 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAction-Conditioned Risk Gating for Safety-Critical Control under Partial Observability
May 14, 2026Many safety-critical control problems are modeled as risk-sensitive partially observable Markov decision processes, where the controller must make decisions from incomplete observations while balancing task performance against safety risk. Although belief-space planning provides a principled solution, maintaining and planning over beliefs can be computationally costly and sensitive to model specification in practical domains. We propose a lightweight risk-gated reinforcement learning approximation for risk-sensitive control under partial observability. The method constructs a compact finite-history proxy state and learns an action-conditioned predictor of near-term safety violation. This predicted candidate-action risk is used in two complementary ways: as a risk penalty during value learning, and as a decision-time gate that interpolates between optimistic and conservative ensemble value estimates. As a result, low-risk actions are evaluated closer to reward-seeking estimates, while high-risk actions are evaluated more conservatively. We evaluate the approach in two safety-critical partially observable domains: automated glucose regulation and safety-constrained navigation. Across adult and adolescent glucose-control cohorts, the method improves overall glycemic tradeoffs and substantially reduces runtime relative to a belief-space planning baseline. On Safety-Gym navigation benchmarks, it achieves a more favorable reward-cost balance than unconstrained RL and several standard safe-RL baselines. These results suggest that action-conditioned near-term risk can provide an effective local signal for approximate risk-sensitive POMDP control when full belief-space planning is impractical.
Spatiotemporal-Aware Bit-Flip Injection on DNN-based Advanced Driver Assistance Systems
Apr 04, 2026Modern advanced driver assistance systems (ADAS) rely on deep neural networks (DNNs) for perception and planning. Since DNNs' parameters reside in DRAM during inference, bit flips caused by cosmic radiation or low-voltage operation may corrupt DNN computations, distort driving decisions, and lead to real-world incidents. This paper presents a SpatioTemporal-Aware Fault Injection (STAFI) framework to locate critical fault sites in DNNs for ADAS efficiently. Spatially, we propose a Progressive Metric-guided Bit Search (PMBS) that efficiently identifies critical network weight bits whose corruption causes the largest deviations in driving behavior (e.g., unintended acceleration or steering). Furthermore, we develop a Critical Fault Time Identification (CFTI) mechanism that determines when to trigger these faults, taking into account the context of real-time systems and environmental states, to maximize the safety impact. Experiments on DNNs for a production ADAS demonstrate that STAFI uncovers 29.56x more hazard-inducing critical faults than the strongest baseline.
Integrating Neural Differential Forecasting with Safe Reinforcement Learning for Blood Glucose Regulation
Nov 16, 2025Automated insulin delivery for Type 1 Diabetes must balance glucose control and safety under uncertain meals and physiological variability. While reinforcement learning (RL) enables adaptive personalization, existing approaches struggle to simultaneously guarantee safety, leaving a gap in achieving both personalized and risk-aware glucose control, such as overdosing before meals or stacking corrections. To bridge this gap, we propose TSODE, a safety-aware controller that integrates Thompson Sampling RL with a Neural Ordinary Differential Equation (NeuralODE) forecaster to address this challenge. Specifically, the NeuralODE predicts short-term glucose trajectories conditioned on proposed insulin doses, while a conformal calibration layer quantifies predictive uncertainty to reject or scale risky actions. In the FDA-approved UVa/Padova simulator (adult cohort), TSODE achieved 87.9% time-in-range with less than 10% time below 70 mg/dL, outperforming relevant baselines. These results demonstrate that integrating adaptive RL with calibrated NeuralODE forecasting enables interpretable, safe, and robust glucose regulation.
Revisiting Adversarial Perception Attacks and Defense Methods on Autonomous Driving Systems
May 14, 2025Autonomous driving systems (ADS) increasingly rely on deep learning-based perception models, which remain vulnerable to adversarial attacks. In this paper, we revisit adversarial attacks and defense methods, focusing on road sign recognition and lead object detection and prediction (e.g., relative distance). Using a Level-2 production ADS, OpenPilot by Comma.ai, and the widely adopted YOLO model, we systematically examine the impact of adversarial perturbations and assess defense techniques, including adversarial training, image processing, contrastive learning, and diffusion models. Our experiments highlight both the strengths and limitations of these methods in mitigating complex attacks. Through targeted evaluations of model robustness, we aim to provide deeper insights into the vulnerabilities of ADS perception systems and contribute guidance for developing more resilient defense strategies.
Decoding Neighborhood Environments with Large Language Models
May 13, 2025Neighborhood environments include physical and environmental conditions such as housing quality, roads, and sidewalks, which significantly influence human health and well-being. Traditional methods for assessing these environments, including field surveys and geographic information systems (GIS), are resource-intensive and challenging to evaluate neighborhood environments at scale. Although machine learning offers potential for automated analysis, the laborious process of labeling training data and the lack of accessible models hinder scalability. This study explores the feasibility of large language models (LLMs) such as ChatGPT and Gemini as tools for decoding neighborhood environments (e.g., sidewalk and powerline) at scale. We train a robust YOLOv11-based model, which achieves an average accuracy of 99.13% in detecting six environmental indicators, including streetlight, sidewalk, powerline, apartment, single-lane road, and multilane road. We then evaluate four LLMs, including ChatGPT, Gemini, Claude, and Grok, to assess their feasibility, robustness, and limitations in identifying these indicators, with a focus on the impact of prompting strategies and fine-tuning. We apply majority voting with the top three LLMs to achieve over 88% accuracy, which demonstrates LLMs could be a useful tool to decode the neighborhood environment without any training effort.
KnowSafe: Combined Knowledge and Data Driven Hazard Mitigation in Artificial Pancreas Systems
Nov 13, 2023



Significant progress has been made in anomaly detection and run-time monitoring to improve the safety and security of cyber-physical systems (CPS). However, less attention has been paid to hazard mitigation. This paper proposes a combined knowledge and data driven approach, KnowSafe, for the design of safety engines that can predict and mitigate safety hazards resulting from safety-critical malicious attacks or accidental faults targeting a CPS controller. We integrate domain-specific knowledge of safety constraints and context-specific mitigation actions with machine learning (ML) techniques to estimate system trajectories in the far and near future, infer potential hazards, and generate optimal corrective actions to keep the system safe. Experimental evaluation on two realistic closed-loop testbeds for artificial pancreas systems (APS) and a real-world clinical trial dataset for diabetes treatment demonstrates that KnowSafe outperforms the state-of-the-art by achieving higher accuracy in predicting system state trajectories and potential hazards, a low false positive rate, and no false negatives. It also maintains the safe operation of the simulated APS despite faults or attacks without introducing any new hazards, with a hazard mitigation success rate of 92.8%, which is at least 76% higher than solely rule-based (50.9%) and data-driven (52.7%) methods.
Experimental Security Analysis of DNN-based Adaptive Cruise Control under Context-Aware Perception Attacks
Jul 18, 2023



Adaptive Cruise Control (ACC) is a widely used driver assistance feature for maintaining desired speed and safe distance to the leading vehicles. This paper evaluates the security of the deep neural network (DNN) based ACC systems under stealthy perception attacks that strategically inject perturbations into camera data to cause forward collisions. We present a combined knowledge-and-data-driven approach to design a context-aware strategy for the selection of the most critical times for triggering the attacks and a novel optimization-based method for the adaptive generation of image perturbations at run-time. We evaluate the effectiveness of the proposed attack using an actual driving dataset and a realistic simulation platform with the control software from a production ACC system and a physical-world driving simulator while considering interventions by the driver and safety features such as Automatic Emergency Braking (AEB) and Forward Collision Warning (FCW). Experimental results show that the proposed attack achieves 142.9x higher success rate in causing accidents than random attacks and is mitigated 89.6% less by the safety features while being stealthy and robust to real-world factors and dynamic changes in the environment. This study provides insights into the role of human operators and basic safety interventions in preventing attacks.
Short: Basal-Adjust: Trend Prediction Alerts and Adjusted Basal Rates for Hyperglycemia Prevention
Mar 16, 2023



Significant advancements in type 1 diabetes treatment have been made in the development of state-of-the-art Artificial Pancreas Systems (APS). However, lapses currently exist in the timely treatment of unsafe blood glucose (BG) levels, especially in the case of rebound hyperglycemia. We propose a machine learning (ML) method for predictive BG scenario categorization that outputs messages alerting the patient to upcoming BG trends to allow for earlier, educated treatment. In addition to standard notifications of predicted hypoglycemia and hyperglycemia, we introduce BG scenario-specific alert messages and the preliminary steps toward precise basal suggestions for the prevention of rebound hyperglycemia. Experimental evaluation on the DCLP3 clinical dataset achieves >98% accuracy and >79% precision for predicting rebound high events for patient alerts.
Towards Developing Safety Assurance Cases for Learning-Enabled Medical Cyber-Physical Systems
Nov 23, 2022Machine Learning (ML) technologies have been increasingly adopted in Medical Cyber-Physical Systems (MCPS) to enable smart healthcare. Assuring the safety and effectiveness of learning-enabled MCPS is challenging, as such systems must account for diverse patient profiles and physiological dynamics and handle operational uncertainties. In this paper, we develop a safety assurance case for ML controllers in learning-enabled MCPS, with an emphasis on establishing confidence in the ML-based predictions. We present the safety assurance case in detail for Artificial Pancreas Systems (APS) as a representative application of learning-enabled MCPS, and provide a detailed analysis by implementing a deep neural network for the prediction in APS. We check the sufficiency of the ML data and analyze the correctness of the ML-based prediction using formal verification. Finally, we outline open research problems based on our experience in this paper.
Robustness Testing of Data and Knowledge Driven Anomaly Detection in Cyber-Physical Systems
Apr 20, 2022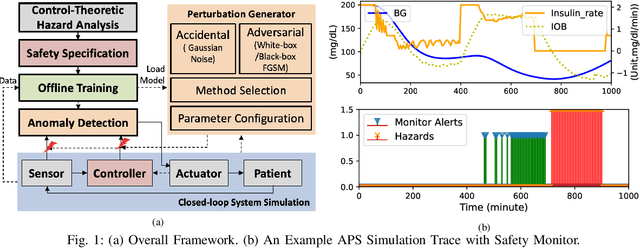
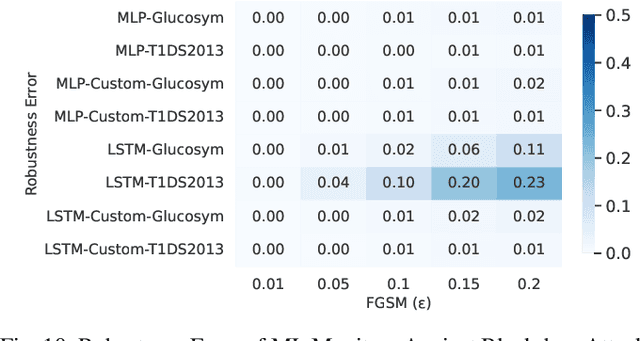
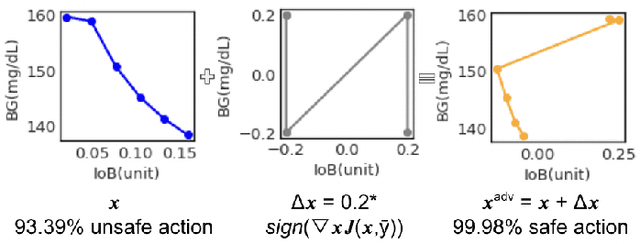
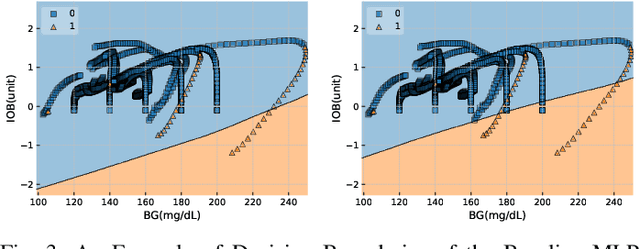
The growing complexity of Cyber-Physical Systems (CPS) and challenges in ensuring safety and security have led to the increasing use of deep learning methods for accurate and scalable anomaly detection. However, machine learning (ML) models often suffer from low performance in predicting unexpected data and are vulnerable to accidental or malicious perturbations. Although robustness testing of deep learning models has been extensively explored in applications such as image classification and speech recognition, less attention has been paid to ML-driven safety monitoring in CPS. This paper presents the preliminary results on evaluating the robustness of ML-based anomaly detection methods in safety-critical CPS against two types of accidental and malicious input perturbations, generated using a Gaussian-based noise model and the Fast Gradient Sign Method (FGSM). We test the hypothesis of whether integrating the domain knowledge (e.g., on unsafe system behavior) with the ML models can improve the robustness of anomaly detection without sacrificing accuracy and transparency. Experimental results with two case studies of Artificial Pancreas Systems (APS) for diabetes management show that ML-based safety monitors trained with domain knowledge can reduce on average up to 54.2% of robustness error and keep the average F1 scores high while improving transparency.